


HỒI QUY PHI TUYẾN
Trong thực tế, mối tương quan giữa biến phụ thuộc với các biến độc lập có thể không theo đường thẳng mà theo đường cong, khi đó mô hình hồi quy phi tuyến sẽ phát huy mức độ hữu dụng.
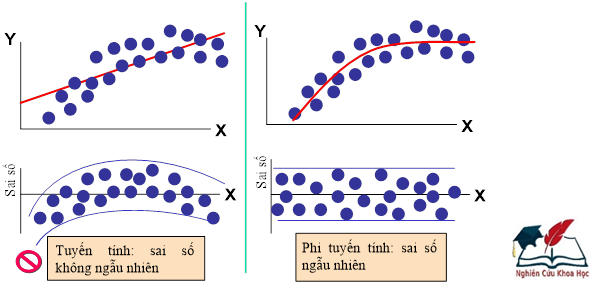
Với dữ liệu dạng phi tuyến, nếu áp dụng hồi quy tuyến tính thì sai số phần dư không ngẫu nhiên, như được trình bày ở Hình 1.
[Nguồn: nghiencuukhoahoc.edu.vn, 2017]
Hình 1. Sai số phần dư hồi quy tuyến tính và phi tuyến
Như vậy, trước khi thực hiện hồi quy, nhà nghiên cứu nên vẽ biểu đồ phân tán để nhận dạng kiểu biến đổi dữ liệu nhằm chọn mô hình hồi quy phù hợp. Khi đó kết quả về mô hình, đánh giá, kiểm định mới đáng tin.
1. Mô hình bình phương
Dạng mô hình:
Y = b0 + b1X1 + b2X12
b1: Hệ số tuyến tính;
b2: Hệ số bình phương.
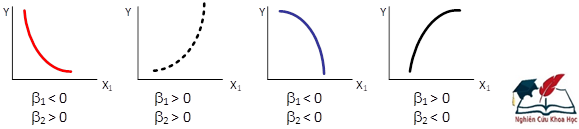
Sử dụng mô hình bình phương khi biểu đồ phân tán của dữ liệu có những hình dạng như được mô tả ở Hình 2.
Sử dụng các Công thức tính b0, b1, b2 ở mô hình HỒI QUY BỘI để tính giá trị cho các tham số b0, b1 và b2 của mô hình phi tuyến.
Đánh giá tác động của bình phương
- So sánh giá trị R2 của mô hình tuyến tính đơn biến với R2 của mô hình bình phương.
- Nếu giá trị hệ số xác định hiệu chỉnh R2 của mô hình bình phương lớn hơn R2 của mô hình tuyến tính đơn biến thì chọn mô hình bình phương.
[Nguồn: nghiencuukhoahoc.edu.vn, 2017]
Hình 2. Các kiểu dữ liệu dạng mô hình bình phương
Kiểm định tác động của bình phương
So sánh hồi quy tuyến tính đơn: Y = b0 + b1X1
Với hàm hồi quy bậc 2: Y = b0 + b1X1 + b2X12
Quy trình kiểm định:
1. Giả thuyết
H0: b2 = 0 (Hệ số bình phương không cải thiện mô hình);
H1: b2 ¹ 0 (Hệ số bình phương có cải thiện cho mô hình).
2. Trị tới hạn
Đọc thêm Mục 3. Kiểm định mô hình ở bài viết HỒI QUY BỘI; bậc tự do df. = n – 3
3. Trị thống kê

Trong đó,
b2: Hệ số bình phương (mẫu);
b2 = 0;
Sb2: Độ lệch chuẩn của hệ số bình phương b2.
4. Kết luận
Đọc thêm ở Mục 3. Kiểm định mô hình ở bài viết HỒI QUY BỘI.
|
Mô hình lũy thừa bậc 3 có dạng như sau:
Y = b0 + b1X + b2X2 + b3X3
2. Hàm số mũ
Được sử dụng khi chiều hướng của chuỗi thời gian là tăng (hay giảm) ở một tỷ lệ không đổi (%). Mô hình có dạng như sau:
Y = b0X1b1X2b2
Trong đó,
b0: Tung độ gốc;
b1, b2: Tốc độ tăng (giảm) theo thời gian.
Lấy ln() hai vế của mô hình hàm số mũ được dạng sau:


Mô hình hàm số mũ là mô hình cho tổng thể nên giá trị của các tham số được ký hiệu là bi, còn mô hình sau khi lấy ln() mô tả mô hình hồi quy mẫu nên các tham số được ký hiệu là bi. Áp dụng Công thức tính hệ số hồi quy ở bài viết HỒI QUY BỘI để tính các hệ số hồi quy b1, b2 của mô hình sau khi lấy ln(). Riêng giá trị hệ số b0 được tính như sau:
Ln(b0) = b’0
b0 = eb’0
Trong đó, trị b’0 là tung độ gốc được tính bằng Công thức tính hệ số hồi quy ở bài viết HỒI QUY BỘI.
Quy trình kiểm định
Kiểm định để kiểm tra các biến độc lập X1 và X2 có tác động đến biến phụ thuộc Y hay không với b1 ¹ 0, và b2 ¹ 0.
1. Giả thuyết
H0: bi = 0;
H1: bi ¹ 0.
2. Trị tới hạn
Tham khảo Mục 3. Kiểm định mô hình ở bài viết HỒI QUY BỘI; Bậc tự do df. = n – k – 1; n: Kích thước mẫu; k: Số lượng biến độc lập.
3. Trị thống kê

Trong đó,
bj: Tốc độ tăng (giảm);
bj = 0;
Sbj: Độ lệch chuẩn của tốc độ tăng (giảm).
4. Kết luận
Tham khảo Mục 3. Kiểm định mô hình ở bài viết HỒI QUY BỘI.
|
Kết thúc.
Tin tức liên quan

31/10
2022
Chất lượng dịch vụ là nhân tố tác động nhiều nhất đến sự hài lòng của khách hàng. Nếu nhà cung cấp dịch vụ đem đến cho khách hàng những sản phẩm có chất lượng thỏa mãn nhu cầu của họ thì doanh nghiệp đó đã bước đầu làm cho khách hàng hài lòng.

27/02
2023
Bảng câu hỏi hay phiếu khảo sát là công cụ để thu thập dữ liệu nhanh chóng với chi phí thấp mà vẫn đảm bảo tính khách quan, bao quát tổng thể dữ liệu. Để có được bảng câu hỏi chính thức, cần xây dựng từ bảng câu hỏi nháp và sơ bộ.

28/02
2023
Mô hình hồi quy đơn là mô hình hồi quy đơn giản nhất và dùng biểu diễn sự phụ thuộc của biến phụ thuộc đối với biến độc lập duy nhất.
Xem thêm